 | |
| |||
 |  |  | |||||||||||||||
 | |||||||||||||||||
スコット・ハウ | |||||||||||||||||
●学歴: 1998年ミシガン大学建築・都市計画学部より博士号(建築学)を取得1997年ミシガン大学建築・都市計画学部より理学修士号を取得。1989年ユタ大学建築学部にて建築学修士号を取得(この間に日本の神奈川大学に1年間留学)。1987年ユタ大学より学士号を取得(アジア研究専攻)。 | |||||||||||||||||
 | |||||||||||||||||
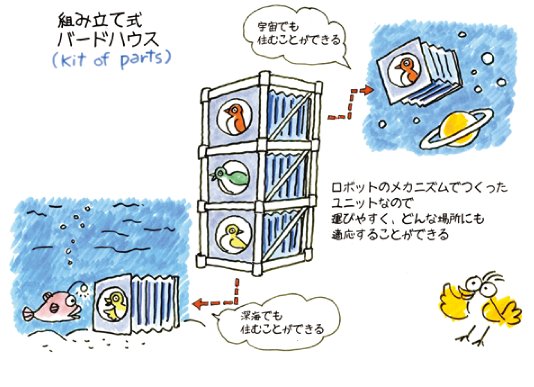
拡張可能な設計の基本原理および形状の基本原理と、変更・修正可能な作業ルールの応用によって、フレキシブルなパラメトリック・システム「キット・オブ・パーツ」は、いかなる状況設定にも適応可能になると言えるでしょう。よく設計された部品は、大量生産し、何度でも繰り返し使用することが可能なので、組立部品の製作工程を事前に終らせ、ロボット製造と自動組み立て作業を行うことができます。キット・オブ・パーツ・システムを使ったロボット建築のコンセプトを探り、ロボット・メカニズムの延長として建築部品を使い、そして、自動建築ハードウェアを建築要素に組み込むというコンセプトを試す。これが、私のしてきた仕事です。
| |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
 | ||||||